Problem Background
This project was completed as part of the CS493 Robotics & 3D Printing course at the University of Fairbanks Alaska.
The problem I was attempting to solve with this project was that peeling bananas can be quite difficult for humans to accomplish and that a robot that might be able to peel a banana could be quite helpful. This problem seemed like the kind of thing that a robot should be able to accomplish, however, I did not know what sort of undertaking I was getting myself into in trying to create this banana peeling robot.
Previous Work
Before going into this project, I was able to find some similar projects that people had done previously. These projects all involved some sort of fruit being peeled and a couple of them even were peeling bananas, so their successes made my attempts seem more plausible.
- Pelamatic has a wide assortment of robots designed to peel and/or pit various fruits, including (but not limited to) oranges, peas, and pomegranates, however, they have a distinct lack of banana-peeling robots. Most of the robots that Pelamatic has involve spinning the fruit and running a blade along the fruit, essentially doing the same thing as a wood lathe, to shave the peel off. I did not think this technique would work very well for bananas, but a method similar to this technique ended up being closer to what I did in my attempt than the other examples.
- This YouTube video shows an automatic banana peeler that it appears a group of students built for a class/club. The design they used involves pushing a slightly pre-cut banana through a mechanism that pulls the peel off in one quick motion. This is an interesting approach to peeling a banana, but it does look like it requires initial setup to work, and it is not exactly what I had in mind for my banana peeling robot.
- This YouTube video shows a robot (named Baxter) controlled using TeleOp being used to peel a banana. This is Baxter’s second attempt at peeling a banana, which ends up being much more successful than the first attempt. Since the robot in this method is controlled by a human, it peels the banana the closest to how a human would, which is similar to the way I intended to peel the banana using my robot. I was not able to follow through with the original plan of having an arm to peel the banana, but perhaps with more time and experience, something like the robot in this example would be achievable.
The Plan
My initial plans for this project involved a robot with an arm on two to three axes that would be able to reach onto the top of the banana, have some sort of way of grabbing the top of the banana, and then peel backwards in a sort of arching motion. The initial plans also involved a much more advanced approach with sensors for banana detection, which ended up being much more than what would be realistic to achieve. Part of the reason this plan was not able to come to fruition was due to the Coronavirus restricting my access to 3D printers, other more advanced materials, and more free time and space to work with. For this and other reasons, the original plan was not able to be attempted, but a second plan was devised that came pretty close to peeling a banana successfully.
The second plan involved having a banana fastened into a sort of cradle that could rotate and would be powered by a motor so that the end of the banana would be spun into a sharp object at a high speed. This plan did seem like it would be able to peel the banana, or at least cut the top off of the banana, and thus, it was the plan that I ended up building.
What Worked
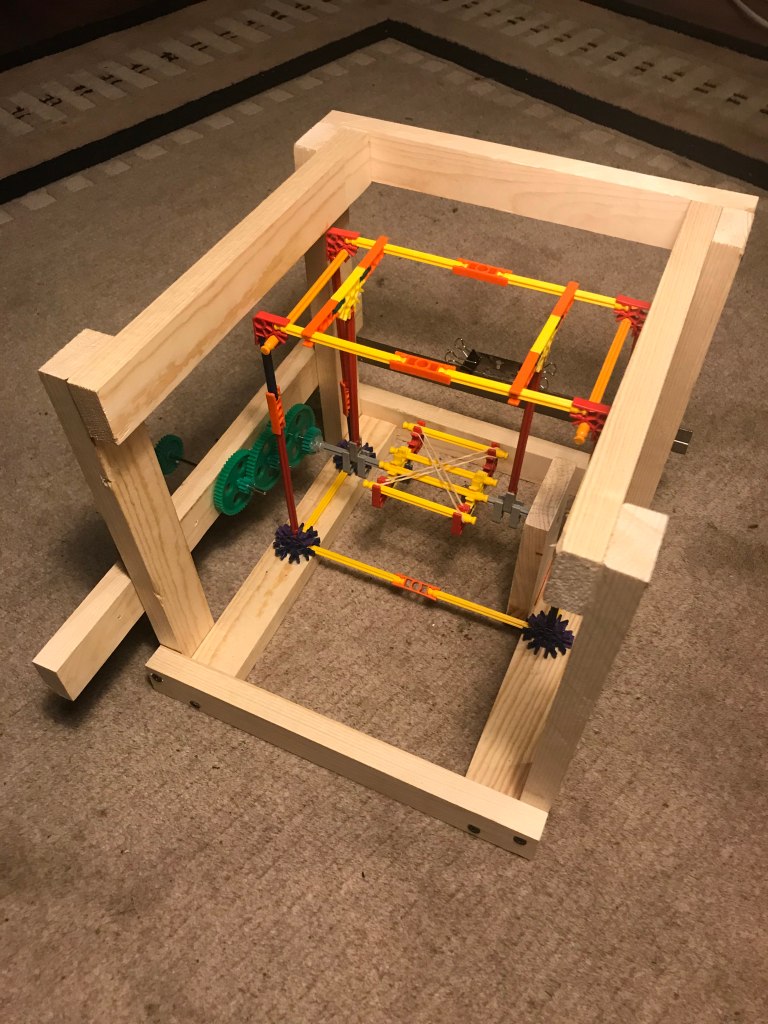
The first step to building the robot was to build a frame, which ended up being a little bit harder than expected, since the original plan was to 3D print custom-designed parts that could easily be put together into some sort of frame. What ended up working surprisingly well though was cutting a piece of 1×2 wood into 1-foot sections that could be screwed together to create the edges of cube to serve as the robot frame.
The next step was to design and build the banana cradle. I ended up finding an old Kinex kit from my childhood that my mother had lying around the house that I was able to salvage enough parts from to build a banana cradle that I could use. This cradle, with a couple rubber bands for fastening, was able to hold a banana for rotating.

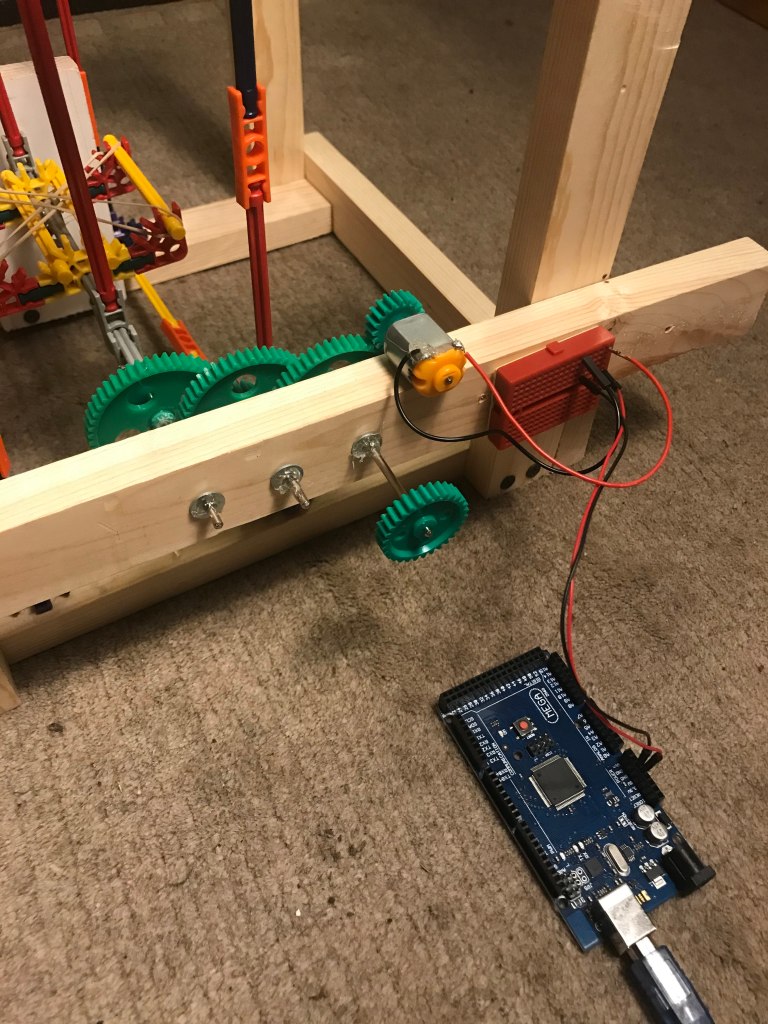
I determined that the small Arduino-powered motor I had was not very strong and would need more torque to rotate a banana, so a chain of gears with a ratio of 1:5 was set up to convert some of that speed into additional torque. With a little bit of external help, the motor was eventually able to spin the banana. I didn’t manage to get access to a motor controller for the motor, so I was controlling it by simply plugging it directly into the 5V and GND pins on the Arduino and then just plugging in the Arduino to my laptop.
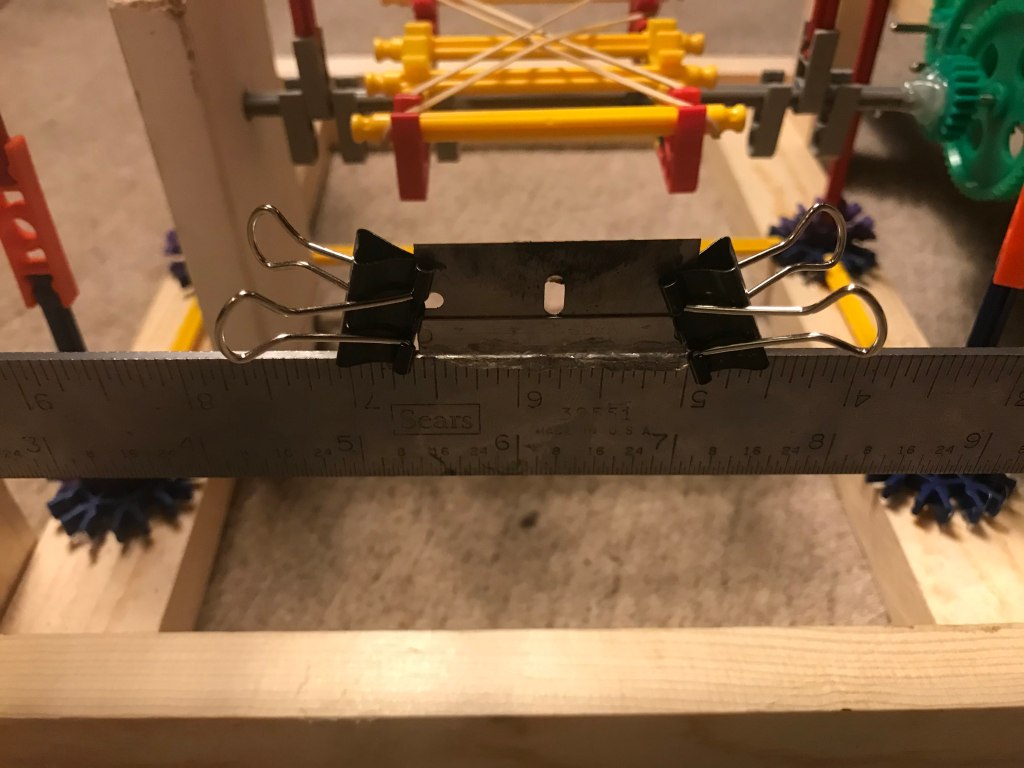
A razor blade was then attached to a metal ruler so that it could be laid across the banana’s field of rotation so that the banana would be forcefully rammed into it.
This is where most of the problems began…
What Didn’t Work
Some of the problems that were faced during this project were discussed in the previous section, like finding building materials and getting enough power out of the motor, but the biggest challenges came with finally trying to peel the banana with the robot.
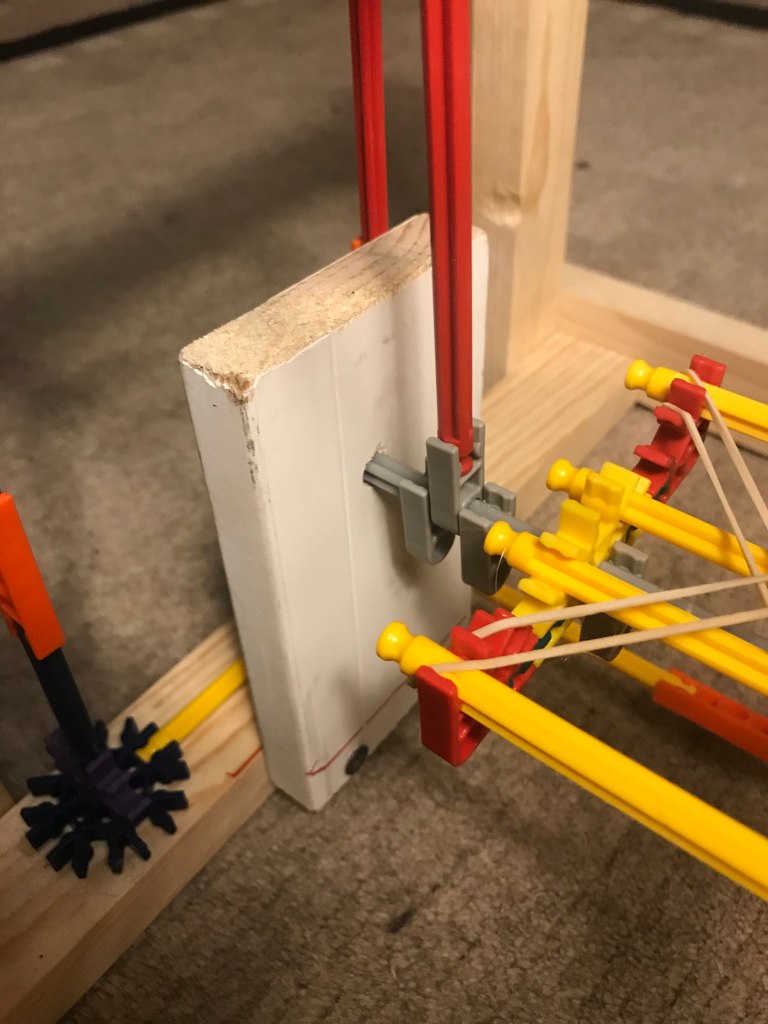
One initial problem was that the axle that the banana cradle was attached to was not secured on one end, so it was able to push backwards when the banana was slammed into the blade. This was solved by attaching another piece of wood with a hole drilled in it for the axle to rest in and rotate freely but be unable to move laterally.
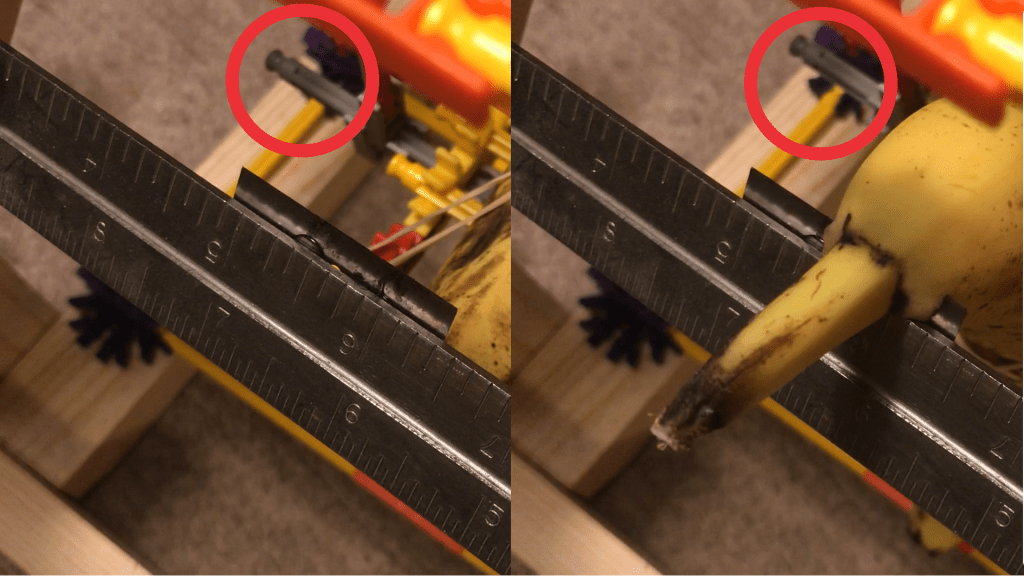
The final and biggest problem ended up being achieving the right angle, placement, and attachment of the razor blade. The initial tests seemed to be failing because there was not enough razor blade extending off of the ruler, so the banana was only getting cut a little bit before it was just getting pushed against the ruler. Eventually, after several more tests, a method of affixing the blade to the ruler was developed that maximized the height of the cutting area.
After correcting these problems, I discovered that the change in the distance between the axis of rotation of the banana cradle and the razor blade from when the banana first reached the razor blade to when the razor blade was about halfway through the banana ended up being enough that the banana was getting pushed up against the side of the ruler, keeping it from rotating further.
I tested different angles and alignments but was ultimately only able to get very close to having my robot produce a peeled banana.
What I Would Have Done Differently
Looking back at this project and its various hurdles and pitfalls along the way has taught me a lot about having realistic expectations and plans before attempting some sort of large undertaking. Some things that I think could have made the robot more successful would be including some sort of arm to peel the banana, having the razor blade be able to move slightly to account for angle changes when the banana rotates, and, quite possibly, simply choosing a different fruit that is easier to peel.
I think having a clearer plan ahead of time is one of the main things I would do differently if I were to attempt this project again, but I believe that being able to clearly visualize an outcome does come with having more experience with the material. This was one of my first robotics projects, but it almost certainly won’t be my last, as I am excited to follow up this (somewhat unsuccessful, but not completely useless) project with more robots in the future.
